成果简介
关节作为机器人核心部件,其性能优劣将直接影响机器人控制效果。为减少关节所占空间并提高其控制性能,研发了机器人关节微型伺服器(舵机),具有驱控一体、集成化、微型化、模块化等特点。在结构设计方面,采用数字化三维设计、有限元强度分析和加工实验等技术,电机采用高性价比的有刷电机作为动力源。在控制方面,自主设计硬件电路,选用STM32F103T8U6为主控芯片;采用L9110S为驱动芯片,将分立电路集成在单片IC中,减小电路设计复杂度,提高系统稳定性;磁编码器AS5600与安装在输出轴末端的磁铁产生霍尔效应,实现关节的速度、位置检测。通过对比单速度闭环控制和转速、电流双闭环控制,分析两者优缺点,最终采用转速、电流双闭环控制调速系统。实验结果表明,机器人微型伺服器(舵机)能满足特定工况要求、具有良好的速度、位置控制精度,具有极佳的应用前景。
应用前景
本成果在服务机器人、教育机器人、特种机械手、微型飞行器等方面具有重要应用前景。
成熟度
中试,具备工业转化条件。
成果展示
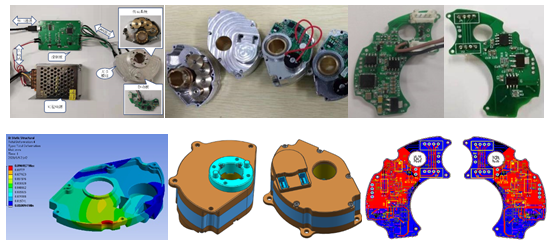
图1 服务机器人微型伺服器(舵机)
知识产权情况
成果完成人
机械工程学院:莫帅
成果转化,请联系成果与合作处,联系人:王老师,联系电话:0771-3810467。
