成果简介
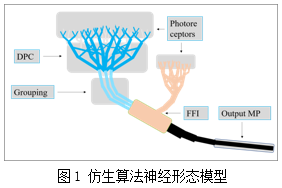
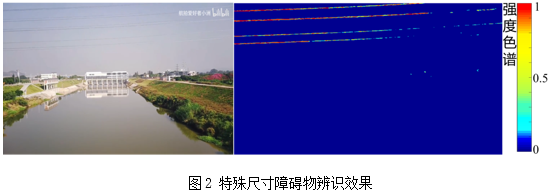
本科技成果是基于昆虫运动敏感神经元研究仿生视觉算法、集成仿生视觉模块,以极低的功耗解决无人机动态飞行过程中碰撞预警及躲避决策的问题。该碰撞预警系统基于运动视觉,感知结果基于运动和碰撞的本质特征而不依赖障碍物表面纹理,可适应无人机动态飞行环境,快速响应障碍物并提供预警音系。目前已经历3代的研究,2018年第一代初步解决无人机避障功能,第二代解决高速运动过程中传感器鲁棒性问题,现阶段第三代已解决特殊环境中微小尺寸碰撞目标(如电力线、小鸟等)检测问题、正在解决远距离危险提前感知、复杂高速场景下多障碍物的碰撞躲避决策等问题。
应用前景
本成果可以较低的功耗提供无人机动态飞行过程中的碰撞预警信息,在智能无人机碰撞预警系统中充当眼睛和类脑决策功能。可在电力巡检、城市监控、林下作业等场景中发挥重要作用。
成熟度
基础研究。
成果展示

知识产权情况

成果完成人
电气工程学院:赵剑楠
成果转化,请联系成果与合作处,联系人:刘老师,联系电话:0771-3272162。
