成果简介
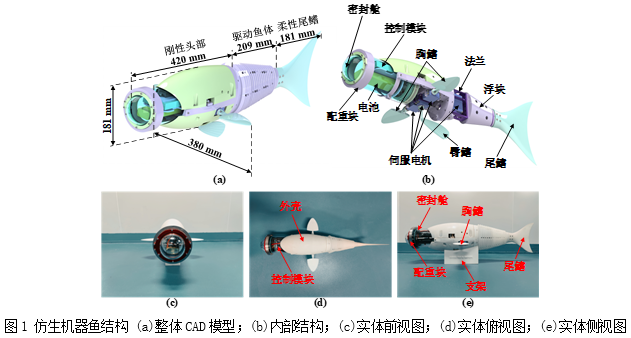
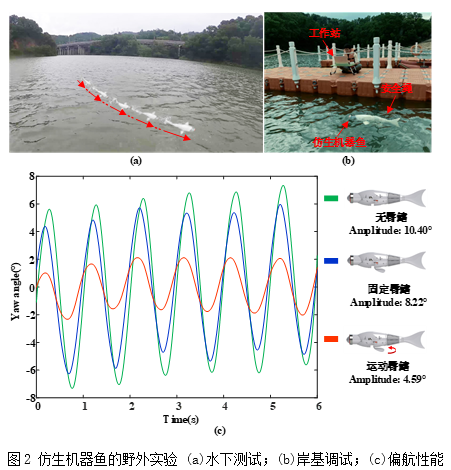
仿生机器鱼作为一种参照鱼类生物特征进行设计的先进水下机器人,具有能耗低、效率高、机动性强、隐蔽性好等显著优势,受到了海洋科考、石油开采、资源勘探、水产养殖等诸多领域的广泛关注。然而,仿生机器鱼的研发需要综合机械学、生物学、水力学、电子学、计算机、控制工程等多学科原理,目前在高稳定巡航方面的性能仍亟待提升。因此,广西大学联合中国科学院深圳先进技术研究院团队共同开发了仿生机器鱼多鳍协调的高稳定巡航技术。采用基于中枢模式发生器(CPG)的控制手段,利用刚柔耦合多鱼鳍的协调原理建立了胸鳍-臀鳍-尾鳍的运动控制理论,厘清了刚柔耦合比、鱼体刚度、拍动频率、拍打幅度等仿生学特征对巡游性能的影响规律,实现了仿生机器鱼的高稳定巡航运动。
本技术的系列成果刊登于《Journal of Bionic Engineering》(封面文章)、《Biomimetics》等业内一流期刊,并得到了Nature旗下Nature Portfolio等媒体的报道。
应用前景
本成果能够在海洋科考、侦测、资源勘探、水体监控、水文测绘等领域形成直接的应用。
成熟度
本成果已经生产相关测试样机,完成了多项野外测试。
成果展示
成果完成人
机械工程学院:丁江
成果转化,请联系成果与合作处,联系人:刘老师,联系电话:0771-3272162。
