成果简介
此类可控变胞式码垛机器人具有显著优点:
一、机器人机械臂机构在两自由度构态时,可实现货物抓取与摆放时的精确定位,结合整机在底座处的旋转运动,可使码垛机器人在其工作空间内任意定位,具有较强的灵活性;
二、机器人机械臂机构在单自由度构态时,码垛机器人可在大空间范围内实现快速搬运及回位,单个输入运动即可实现整机动作,运动稳定性较强,且便于控制;
三、码垛机器人在停机状态时,机械臂机构处于零自由度稳定构态。
应用前景
本成果可广泛应用于各类产业自动化生产线的码垛任务,也可通过对末端执行器少许改装,执行喷漆、焊接等任务。
成熟度
应用基础研究(小试)
成果展示

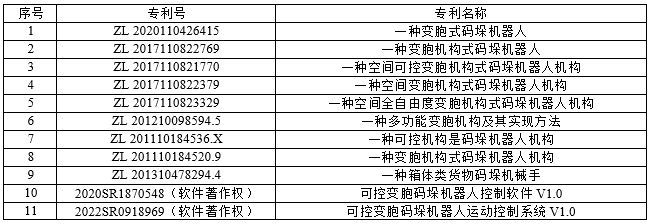
知识产权情况
成果完成人
机械工程学院:王汝贵
成果转化,请联系成果与合作处,联系人:刘老师,联系电话:0771-3272162。
