成果简介
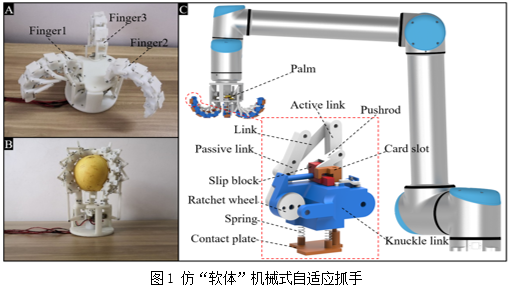
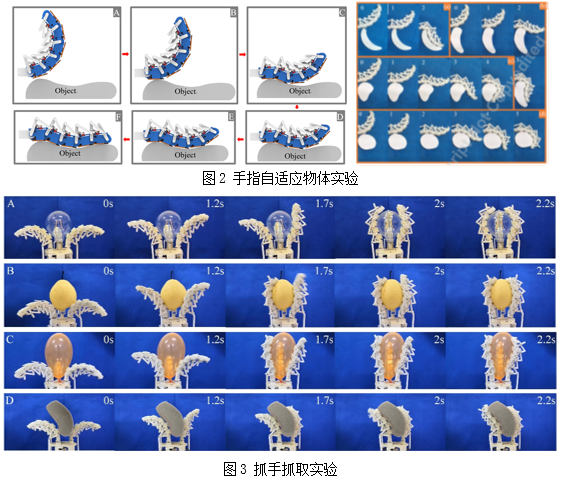
此类抓手是一种面向易碎、易变形物体或动物活体抓取或抓持任务的理想的机械式抓手,我们已在公开发表的论文中将其定义为“GXU-Grasper”,该抓手同时具备以下优点:(1)手指能自适应其有效工作空间内任意轮廓形状的物体(不需要任何传感技术反馈控制,具有软体抓手特征),可满足机器人抓手多样化操作需求;(2)无论手指有多少段指节(指节单元)组成,抓手手指自由度为一;(3)各手指抓持力绝对均匀,并且抓持力理论上只取决于安装于每个指节单元内的弹簧弹性系数;(4)与软体抓手不同,该仿“软体”机械式自适应抓手结构为全刚体机械式结构,承载能力强;(5)抓手可有效抓取易碎易变形物体,亦可无创抓取动物活体;(6)抓手可制作成更小尺寸,抓取细小物体(或活体生物),亦可将抓手制作成更大尺寸,实现任意环境下任意物体或装备的均匀、牢固抓持。
应用前景
本成果可广泛应用于各种作业环境下易碎或易变形物体的可靠抓持或抓取,比如:工业或轻工业易碎易变形产品的抓取或抓持、生物或化学智能实验室玻璃容器抓取或抓持、水下生物样本活体无损可靠抓捕,并可将此抓手尺度细小化,完成对细小生物活体抓取。
成熟度
应用基础研究(小试)。
成果展示
知识产权情况

成果完成人
机械工程学院:王汝贵
成果转化,请联系成果与合作处,联系人:刘老师,联系电话:0771-3272162。
